
researcher and developer with passion!
My focus is on the dynamics of mechanical systems, with expertise ranging from theory to application.
This website presents my research, my future goals and some of my projects.
I am looking for a motivated environment where I can contribute my expertise and drive to develop and pioneer intelligent systems of the future.

Matlab
90%
Python
85%
Fortran
35%
C++
50%
OpenCV
80%
Blender
70%
Latex
90%
HTML & CSS
60%
Teamplayer
100%
I'm a specialist in multibody dynamics with the expertise to model, reduce, and simulate complex dynamical systems.
Mechanical models based on first principles describe real-world physics and are therefore suitable for studying qualitative behavior as well as for model-based predictive control.
With the aim to describe reality.
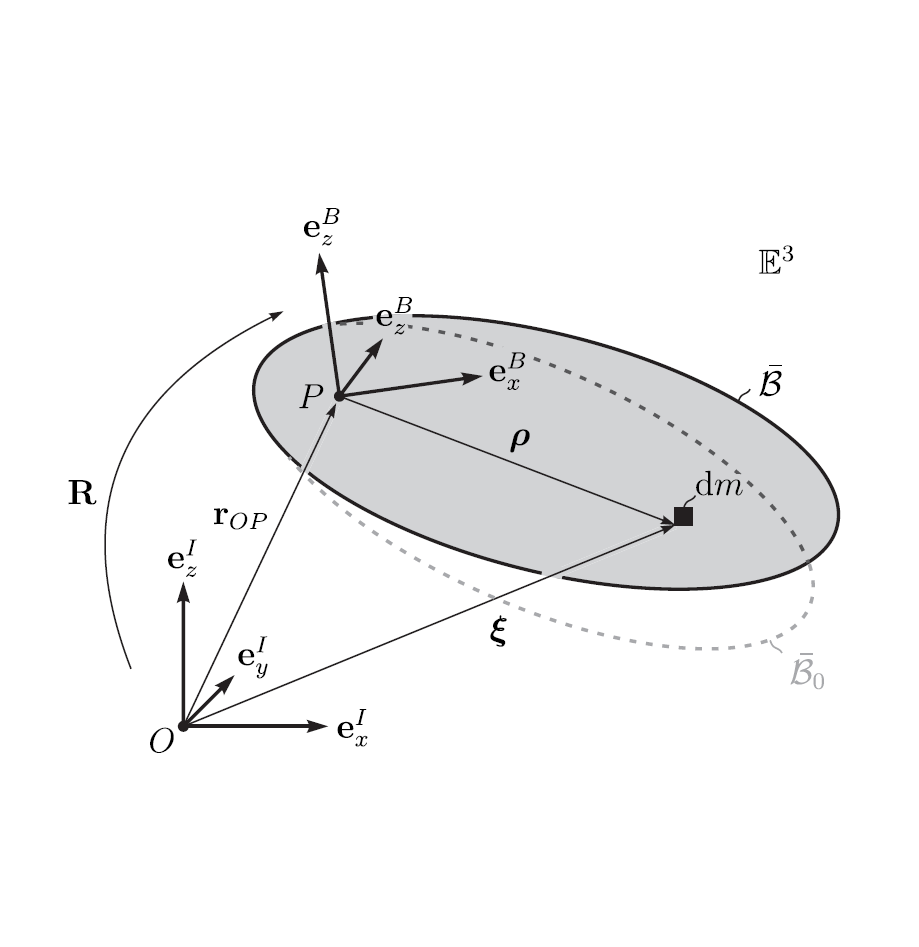
Our sourounding world is three-dimensional. If we want to track spatial motions, develop new theories and simulate three-dimensional systems, it is essential to understand the mathematics behind.
Especially, the parametization of orientations is far from trivial and we have to deal with singularities, ambiguities, and other difficulties. An important question in this context is how to interpolate between orientations and which system coordinates and velocities are appropriate to structurally simplify the system equations.
The goal of nonlinear dynamics is to understand and predict qualitative system behavior in engineering applications.
Even an apparently simple system can exhibit rich dynamic behavior. The tippedisk, as a mathematical-mechanical archetype for friction-induced instabilities combines a variety of theories:
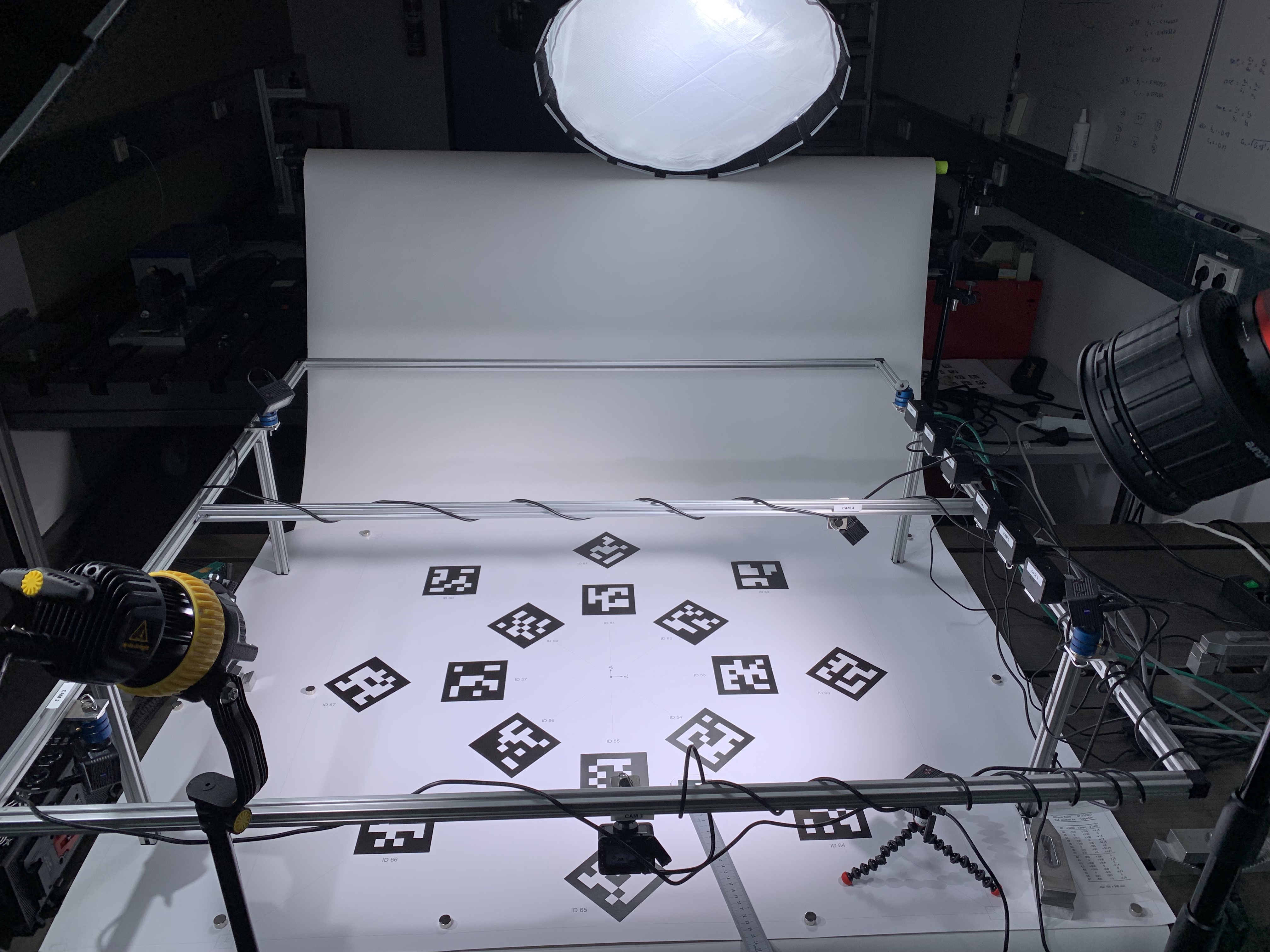
During my PhD, I developed my own object tracking system that allows precise measurement in both high-speed mode as well as in multi-camera setup.
Due to the high flexibility and scalability of the system, it is used in various projects at the Institute for Nonlinear Mechanics:
Vehicle Dynamics combines the fundamental topics of my research: 3D kinematics, contact mechanics, and nonlinear dynamics. Consequently, I have been studying the hunting motion of rail vehicles and the stability of towed wheels.
Both systems exhibit interesting dynamic behavior and show unstable, stationary motion when a critical speed is exceeded, implying critical oscillations and unsafe driving conditions.
From the perspective of contact mechanics, the wheel-rail interaction is of great interest. Proper modeling of this interaction requires appropriate contact kinematics, which leads to constrained optimization problems.
So far, the developed object tracking system is not able to perform real-time measurements. The next logical step is to enable real-time capability so that better state estimates can be obtained from visual measurements. In addition, this enables control based on camera images.
The current system is highly flexible and can be scaled to large dimensions, directly motivating absolute vehicle tracking. Using unmanned aerial vehicles or telezoom lenses, poses new challenges. To overcome these challenges, neural networks can be used for a better camera calibration.
Furthermore, some interfaces need to be set up to fuse the camera measurements with additional sensor data to improve measurement accuracy.
My overall goal is to transfer tools and methods from theory to application in order to solve and understand real-world engineering problems. Because of my affinity for vehicles and my expertise in the field of nonlinear mechanics, I am naturally drawn to the subject of vehicle dynamics.
From an application point of view, singular perturbation theory, for example, seems to be a mathematical concept which hardly plays a role in vehicle dynamics. However, this is not the case! Even for the simple quarter car model or the oversteering two-wheel vehicle, slow-fast and thus singularly perturbed behavior plays an important role.
To improve vehicle performance, suspension kinematics and tires are of particular importance. Both components often have a nonsmooth character, which requires the application of set-valued force laws.
My vision is to develop new suspension and tire models and to perform complete vehicle simulations accompanied by experimental validation. Here, proprietary simulation environments enable the control of driving simulators or the development of new algorithms for autonomous driving.
Vehicle Dynamics is intrisically highly nonlinear. Moreover, the interaction between tires and the road is extremely coplex and dificut to model.
Using advanced set-valued contact laws in a nonsmooth framework allows for more realistic friction models and therefore a better description of physics. Based on the resulting models, MPC and reinforcement learning strategies can be applied.
Supervision and implementation of a test bench experiment to identify beam parameters and to develop control for soft tendon actuated robots.
To obtain a photorealistic multi-body visualization, I developed a Blender interface that allows convenient automatic generation of animations.
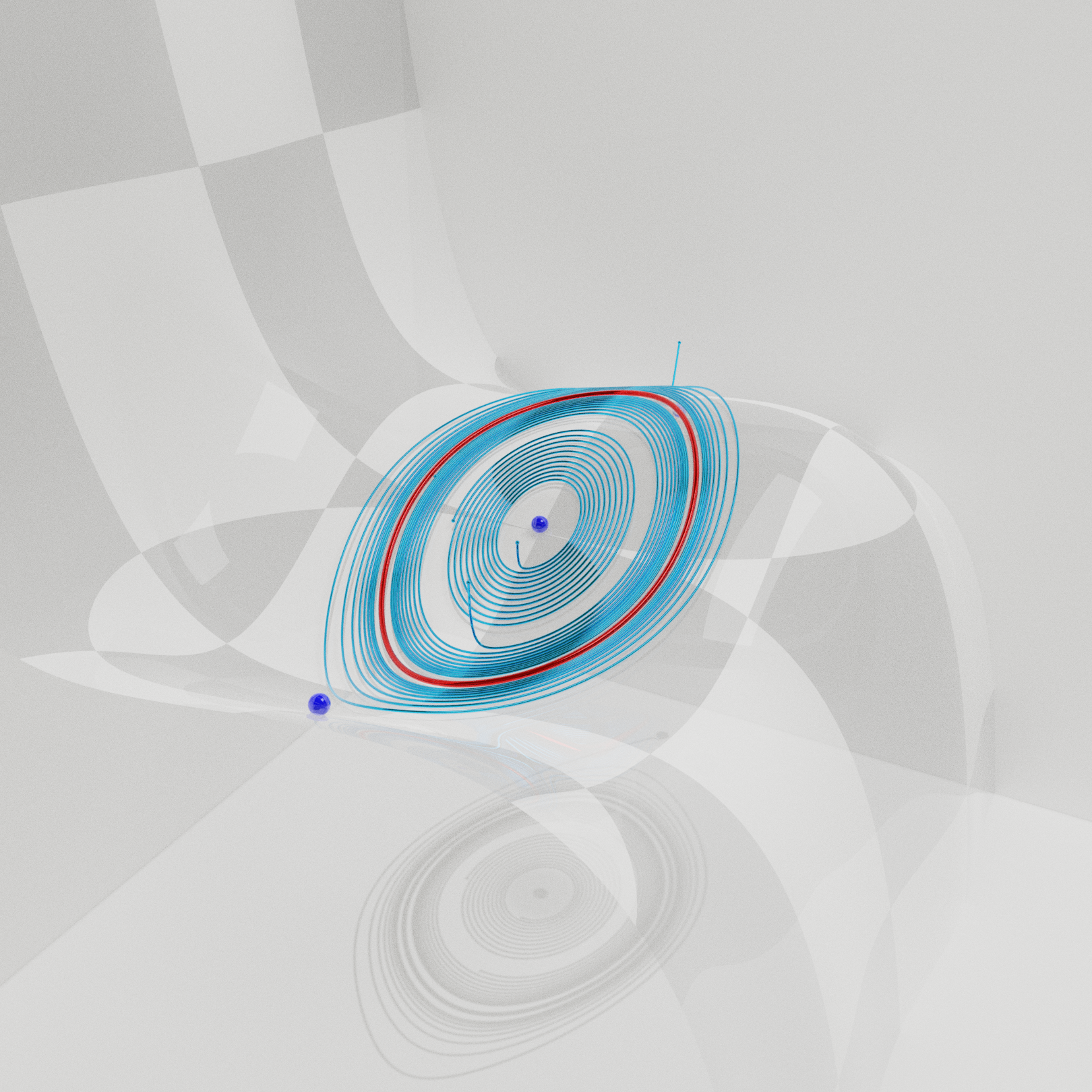
To extend the application to the visualization of two-dimensional manifolds and trajectories in a three-dimensional state space, a second Blender interface was programmed.

This control project was initiated and led by Pascal Preiswerk and myself, with the goal of demonstrating trajectory optimization and nonlinear control.
Since then, the driven pendulum has served as a demonstator for engineering cybernetics and as a hands-on project for students.
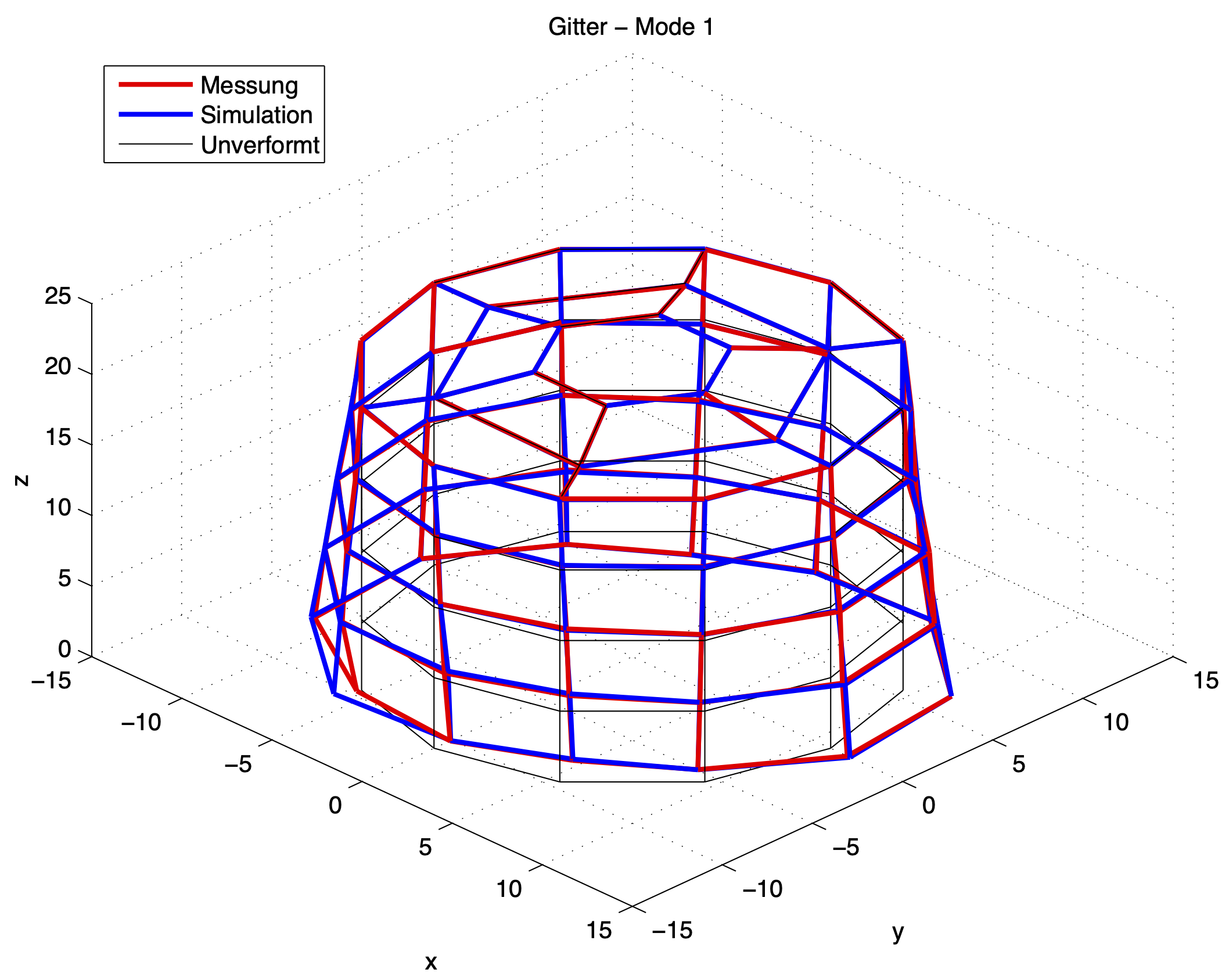
As part of my Bachelor's thesis, I carried out a numerical and experimental modal analysis of an electric motor housing.
Model identification and evaluation of linear modes.
Development and implementation of a new material subroutine.
Parameter study and comparison of the different effects of hardening on temperature distribution.
Evaluation of FEM simulations of the friction stir welding process.
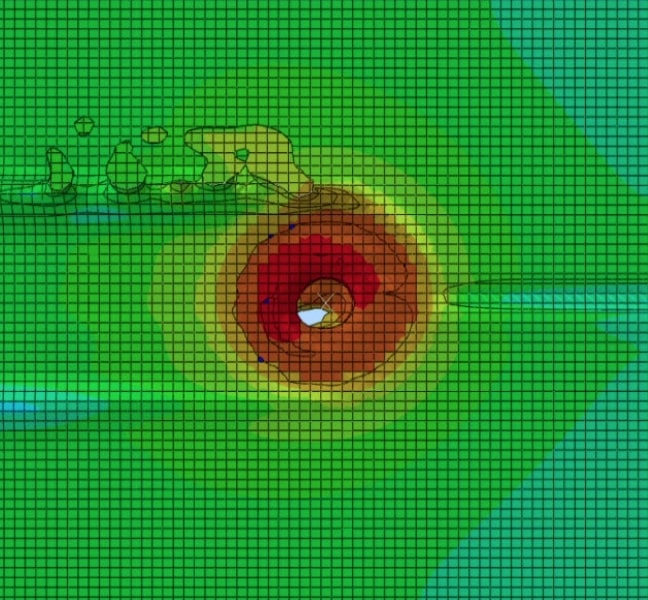
My brother is a physician and has investigated tissue damage caused by photon and proton irradiation as part of his doctoral thesis at the HIT at the University of Heidelberg.
For this purpose, I developed a Python program to automatically evaluate experimental and simulated irradiation data and to calculate characteristic quantities.
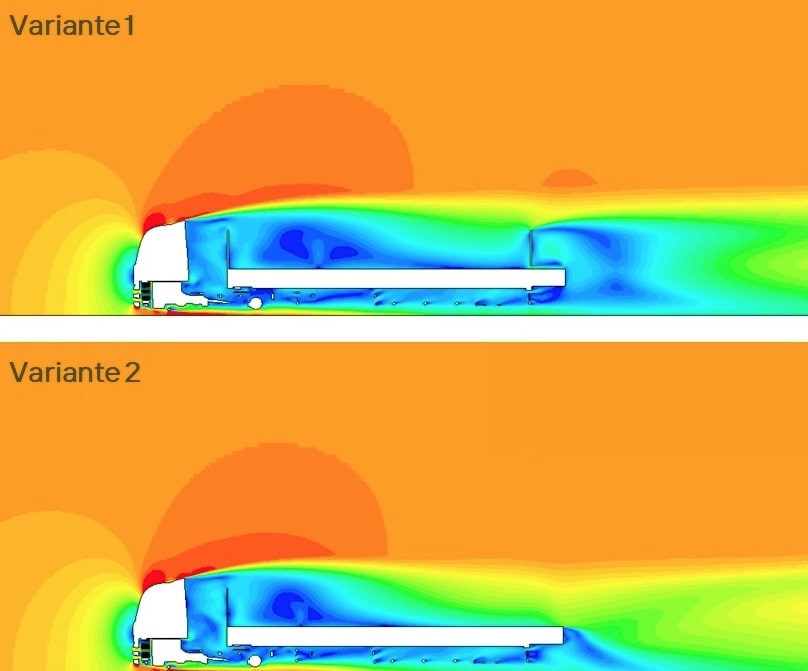
The aerodynamics of semi-trailers are strongly affected by the geometry. Therefore, the question in applied transportation is how to modify the shape of the trailer to improve the aerodynamics and thus efficiency.
For an international freight forwarding company, I planned and coordinated CFD simulations, which were implemented externally by the FKFS of the university of stuttgart.
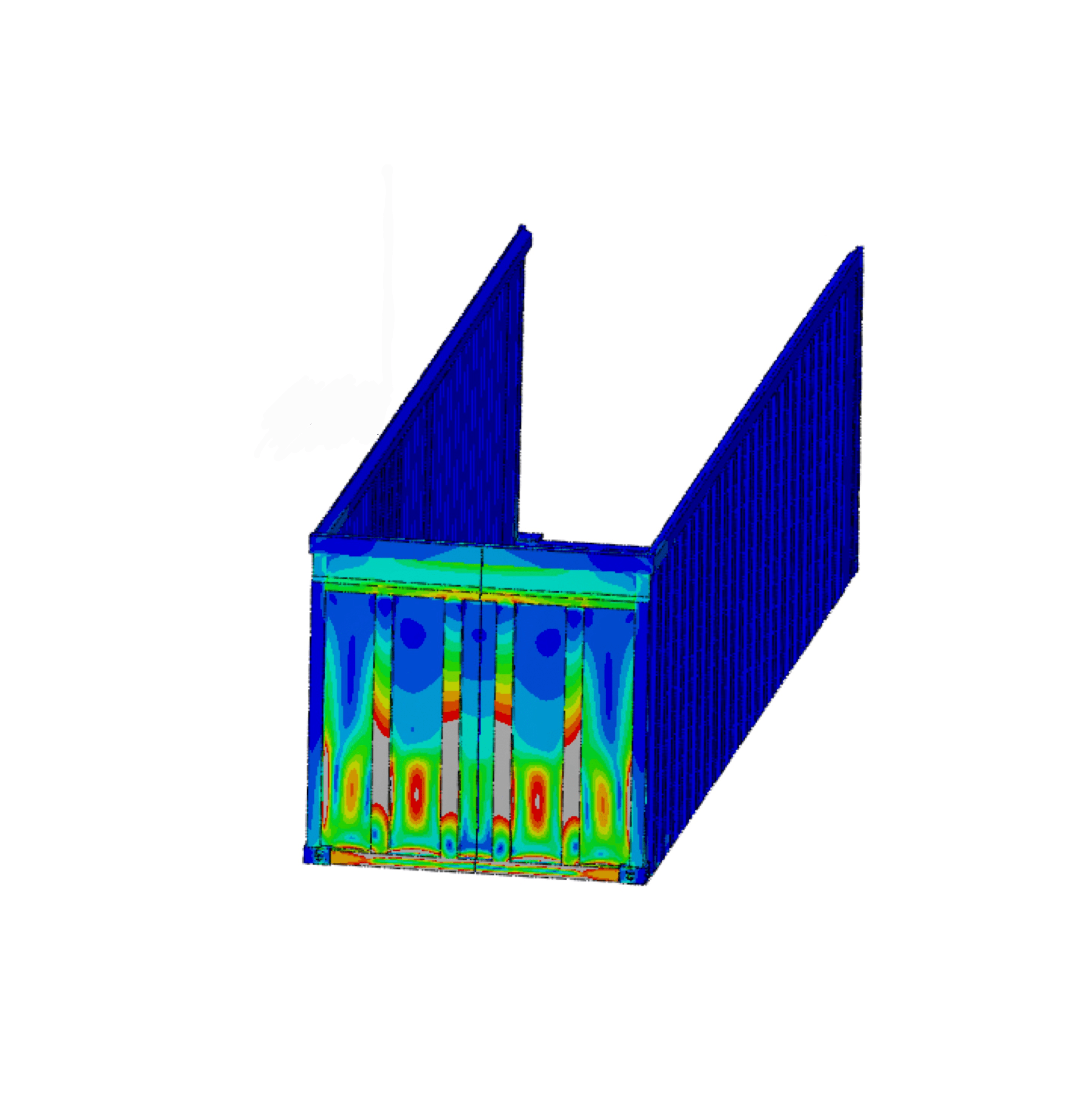
The virtual strength testing of containers enables the cost-efficient determination of tailor-made and safe loading instructions.
I supervised and coordinated FEM simulations for a freight forwarding company in cooperation with the MPA of the university of stuttgart.

To enhance the espresso experience, I am currently working on identifying portafilter espresso machines. Various objective model are developed, ranging from simple models to artificial neural networks.
at the
Institute for Nonlinear Mechanics (INM)
of the University of Stuttgart.
PhD Thesis: "Nonlinear Dynamics of the Tippedisk:
a holistic analysis"
October 2023
Since October 2017, I have been working as a research and teaching assistant with the goal
of
obtaining a PhD at the
Institute for Nonlinear Mechanics (INM)
at the University of Stuttgart.
2017-2023
in
mechanical engineering (M.Sc.)
at University of Stuttgart.
Master's Thesis: Dynamics of a rolling cylinder under consideration of nonholonomic
constraints and friction
2017
Department Chassis Development Vehicle Dynamics, EFF1
- Optimization of test bench evaluation routines
- Implementation of tire models
2015-2016
Mechanical engineering at University of Stuttgart.
Specialization in nonlinear mechanics at
INM
and materials modeling at IMWF.
Special project: Development and implementation of a material subroutine for friction
stir
welding
2014-2017
in
mechanical
engineering (B.Sc.)
at University of Stuttgart.
Bachelor Thesis:
Numerical and Experimental Modal Analysis for the Housing of an Electric Motor
2014
Beginning of my bachelor studies in mechanical engineering at the University of Stuttgart.
2011-2014

I look forward to hearing from you:
Email: sailer@inm.uni-stuttgart.de Web: INM website with list of publicationsMore information about my accademic research.
© Simon Sailer